Please be aware we use cookies to make your experience better. A cookie is a piece of data stored on a visitor's hard drive to help us improve your access and identify repeat visitors. Cookies can also enable us to track and target the interests of our users to enhance the experience on our site. Usage of a cookie is in no way linked to any personally identifiable non-public information. Learn more.
Finishing Copilot
SKU
326444
Product Details
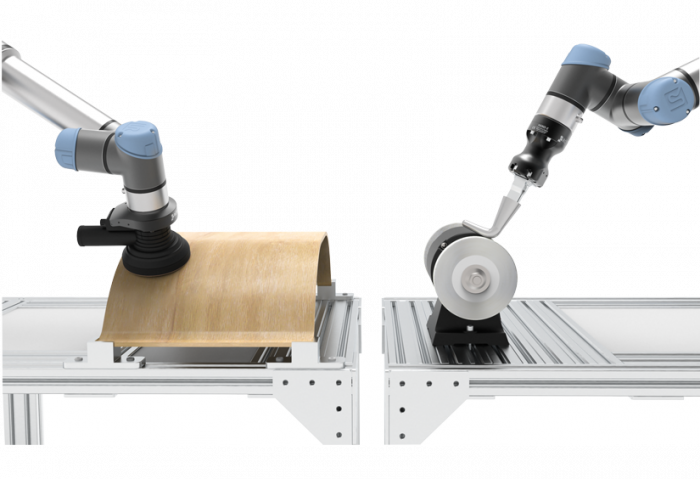
The Robotiq finishing copilot is software for finishing applications that utilize Universal Robots. You don’t need a robotics background to use Finishing Copilot. Its intuitive programming interface guides you through the steps to set up an efficient finishing application. The contact offset node uses a point on the external tool as a reference to measure wear. Contact offset validates the tool’s exact position anytime you wish. If there’s a slight change, the robot program automatically adapts all related parameters.
You can program complex finishing trajectories by teaching fewer than 10 waypoints. Whether it’s on a flat, curved, or spherical surface, the Finishing Copilot generates a complete path and applies consistent force at each cycle. Finishing Copilot lets you program an external TCP. This tells the robot that the finishing tool is external to the robot, unlike in most cobot applications. The finishing task is then processed with the robot bringing the part to the external TCP. The contact offset node uses reference points on the part to validate its position. If there’s a slight change, the robot program automatically adapts all related parameters.
- Set an external tool center point
- Find and apply contact offset
- Generate finishing paths with fewer than 10 waypoints
- Achieve 0.2-mm precision (same as Universal Robots)
- Find a surface
- Perform various insertions
- Hand-guide your robot
- Follow complex trajectories
- Edit point-to-point trajectories
- Apply constant force and define the stiffness for each axis
- Reset sensor values to zero