The store will not work correctly when cookies are disabled.
Please be aware we use cookies to make your experience better.A cookie is a piece of data stored on a visitor's hard drive to help us improve your access and identify repeat visitors. Cookies can also enable us to track and target the interests of our users to enhance the experience on our site. Usage of a cookie is in no way linked to any personally identifiable non-public information.Learn more.
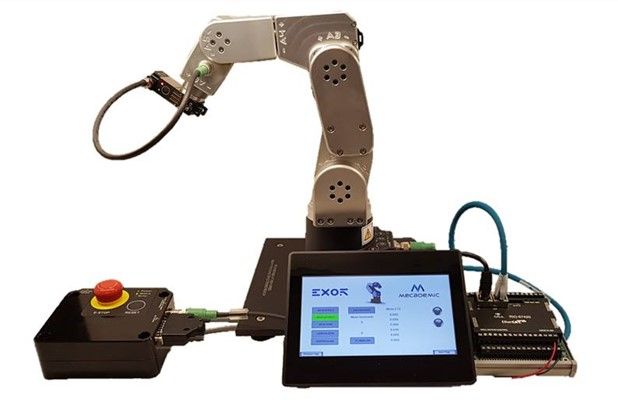
The Meca500 EtherCat Master Controller Kit is a pre-configured kit that contains everything you need to get a Meca500 6-axis industrial robot commissioned right out the box. It is the perfect solution for pick and place and robotic assembly applications requiring precise and repeatable positioning. The Kit includes PLC code examples that will greatly speed up the development of your project. Customers can save up to a week's set-up time with Electromate's preconfigured Kit solution.
Kit Components:
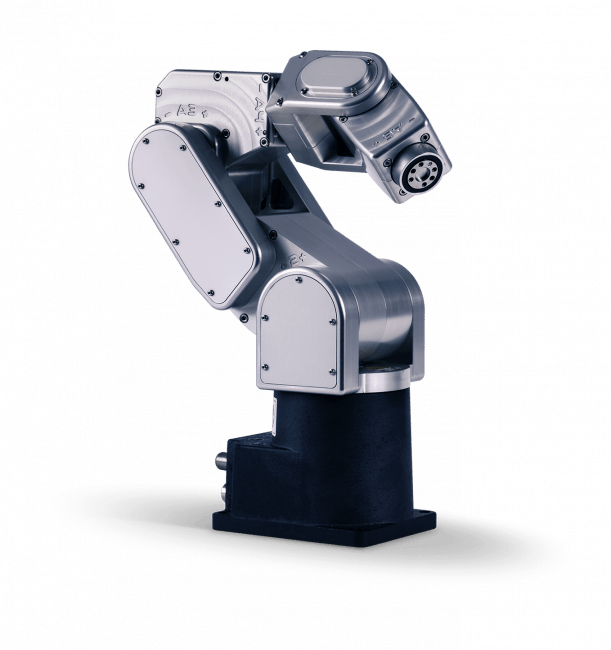
The Meca500 6-axis industrial robot is a plug-and-work automation component. This robot is a slave component rather than a master, which makes it very easy to integrate via any computer or PLC. The Meca500 doesn’t require any training courses, software installations, or additional option purchases. There are no proprietary programming languages: Commands are ASCII NULL terminated strings sent through TCP/IP. All major programming languages (C, C++, Python, LabView, etc.) that can handle TCP/IP socket programming can be used. Firmware updates are included.
Developed in collaboration with SCHUNK, the MEPG electric parallel gripper is fully integrated with the Meca500 robot. In addition to using integrated open and close commands, you can adjust the force and velocity of the grip. The electric gripper is supplied with an adapter plate. You can choose between two cables: one with 90° connectors (as shown above) or one with straight connectors.
An industrial HMI with high level functionality. The eSmart107 has a ARM Cortex dual core CPU, 2 Ethernet ports, 2 CAN ports, 4 Serial ports, 2 USB ports. The unique connectivity ability of JMobile allows the eSMART107 to communicate with a vast library of critical protocols as well as OPC UA standard and pub/sub server and client.
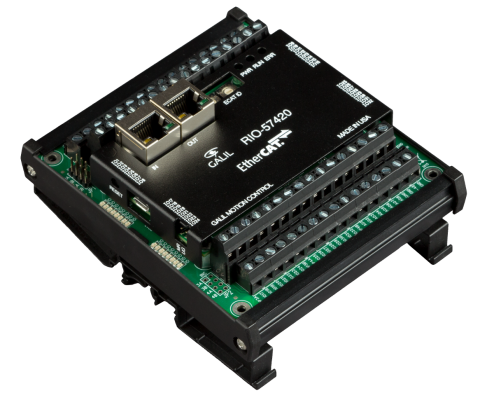
A compact, cost-effective EtherCAT I/O slave module. It is packed with digital and analog I/O to be used remotely in an EtherCAT automation system. Each RIO-574x0 has 16 optoisolated digital inputs and 16 high-power, 500mA sourcing, optoisolated digital outputs. The RIO-57420 is expanded to include 8 analog inputs and 8 analog outputs, both configurable in the ranges of 0-5V, 0-10V, ±5V, or ±10V. The RIO-574x0 can be configured over USB in a few steps.
The Mecademic web interface supports external six-axis and three-axis USB joysticks. Connect them to your PC and use them for jogging our robots via their web interface. You may use 3Dconnexion’s six-axis SpaceMouse. However Mecademic’s three-axis joystick is better suited for precise manipulation thanks to its Hall effect sensors and stiffer springs.
A ready-to-go pre-configured kit only available at Electromate.
A cookie is a piece of data stored on a visitor's hard drive to help us improve your access and identify repeat visitors. We use necessary cookies to make our site work. We'd also like to set optional cookies to help us improve it. Usage of a cookie is in no way linked to any personally identifiable non-public information. Learn More.
By clicking “Accept”, you consent to the use of ALL the cookies. However you may visit Cookie Settings to provide a controlled consent.